
数据结构 图

数据结构 图
mengnankkzhou定义-各种分类
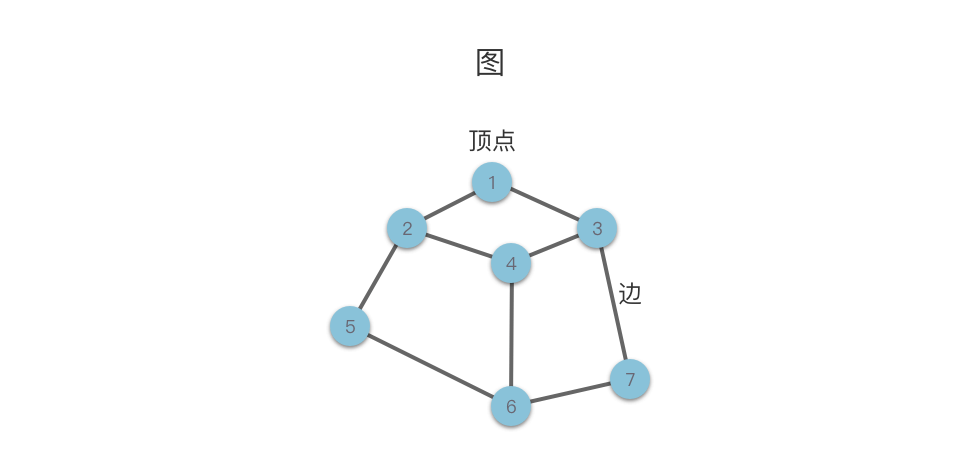
图(Graph):由顶点的非空有限集合 VV (由 n>0n>0 个顶点组成)与边的集合 EE(顶点之间的关系)构成的结构。其形式化定义为 G=(V,E)G=(V,E)。
- 顶点(Vertex):图中的数据元素通常称为顶点,在下面的示意图中我们使用圆圈来表示顶点。
- 边(Edge):图中两个数据元素之间的关联关系通常称为边,在下面的示意图中我们使用连接两个顶点之间的线段来表示边。边的形式化定义为:e=⟨u,v⟩e=⟨u,v⟩,表示从 uu 到 vv 的一条边,其中 uu 称为起始点,vv 称为终止点。
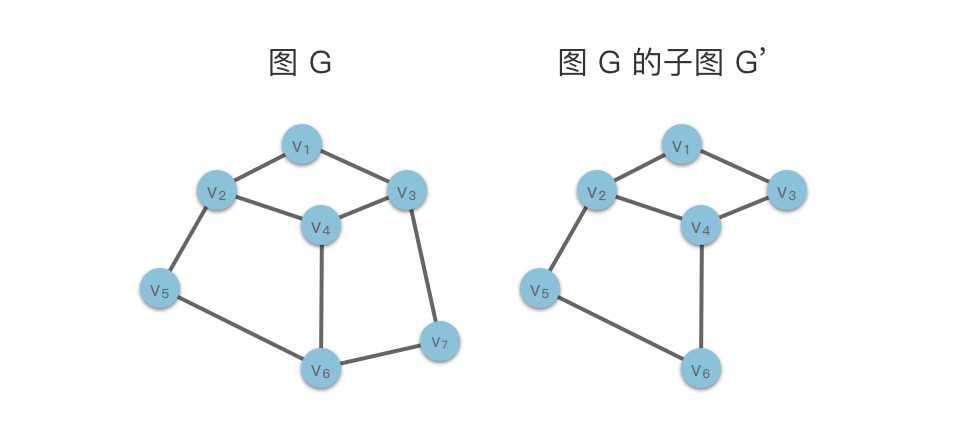
特别的,根据定义,GG 也是其自身的子图。
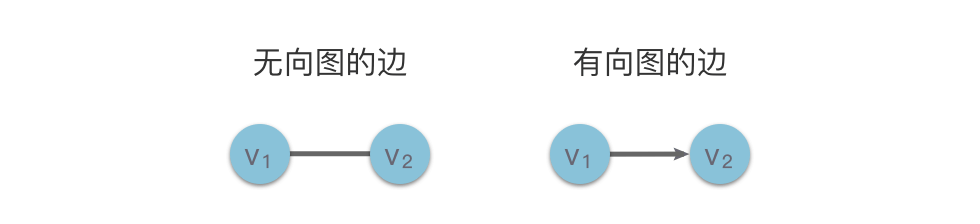
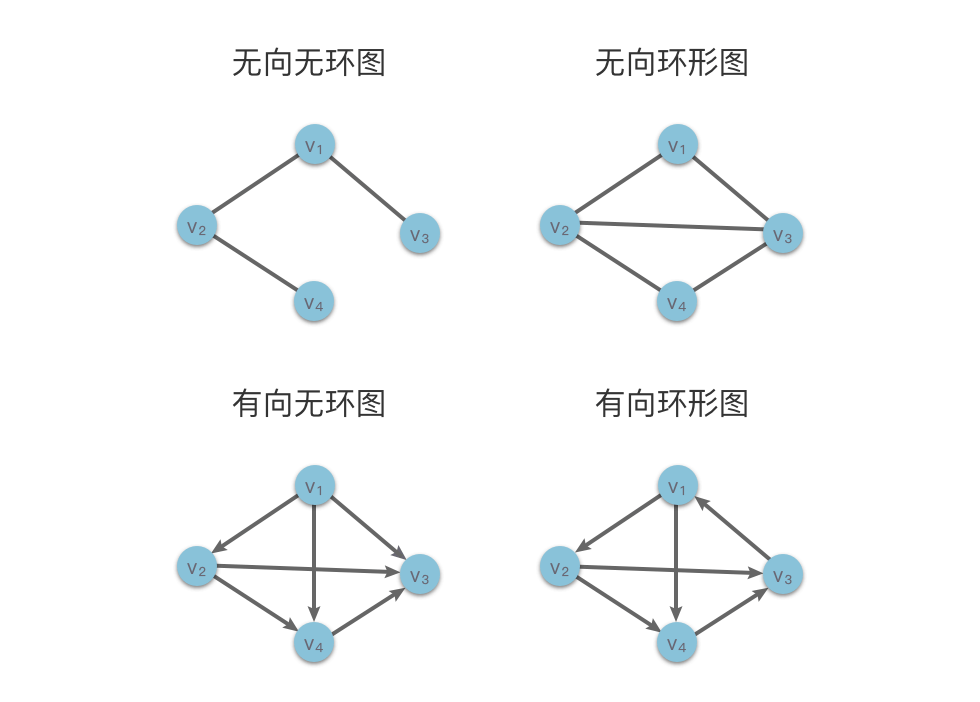
- 无向图(Undirected Graph):如果图中的每条边都没有指向性,则称为无向图。例如朋友关系图、路线图都是无向图。
- 有向图(Directed Graph):如果图中的每条边都具有指向性,则称为有向图。例如流程图是有向图。
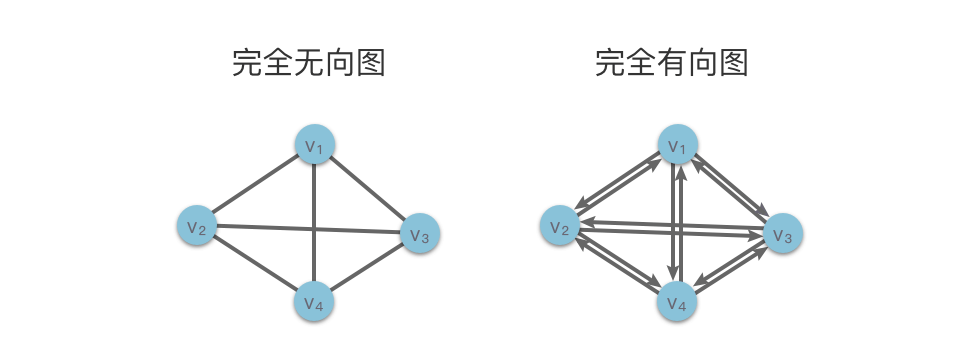
如果无向图中有 nn 个顶点,则无向图中最多有 n×(n−1)/2n×(n−1)/2 条边。而具有 n×(n−1)/2n×(n−1)/2 条边的无向图称为 「完全无向图(Completed Undirected Graph)」。
如果有向图中有 nn 个顶点,则有向图中最多有 n×(n−1)n×(n−1) 条弧。而具有 n×(n−1)n×(n−1) 条弧的有向图称为 「完全有向图(Completed Directed Graph)」。
说白了就是全都连起来了
- 顶点的度:与该顶点 viv**i 相关联的边的条数,记为 TD(vi)T**D(v**i)。
例如上图左侧的完全无向图中,顶点 v3的度为 3。
而对于有向图,我们可以将顶点的度分为 「顶点的出度」 和 「顶点的入度」。
- 顶点的出度:以该顶点 viv**i 为出发点的边的条数,记为 OD(vi)O**D(v**i)。
- 顶点的入度:以该顶点 viv**i 为终止点的边的条数,记为 ID(vi)I**D(v**i)。
- 有向图中某顶点的度 = 该顶点的出度 + 该顶点的入度,即 TD(vi)=OD(vi)+ID(vi)T**D(v**i)=O**D(v**i)+I**D(v**i)。
例如顶点v3的度就是6,3+3=6
-
环(Circle):如果一条路径的起始点和终止点相同(即 vi0==vimv**i0==vim ),则称这条路径为「回路」或者「环」。
-
简单路径:顶点序列中顶点不重复出现的路径称为「简单路径」。
而根据图中是否有环,我们可以将图分为「环形图」和「无环图」。
- 环形图(Circular Graph):如果图中存在至少一条环路,则该图称为「环形图」。
- 无环图(Acyclic Graph):如果图中不存在环路,则该图称为「无环图」。
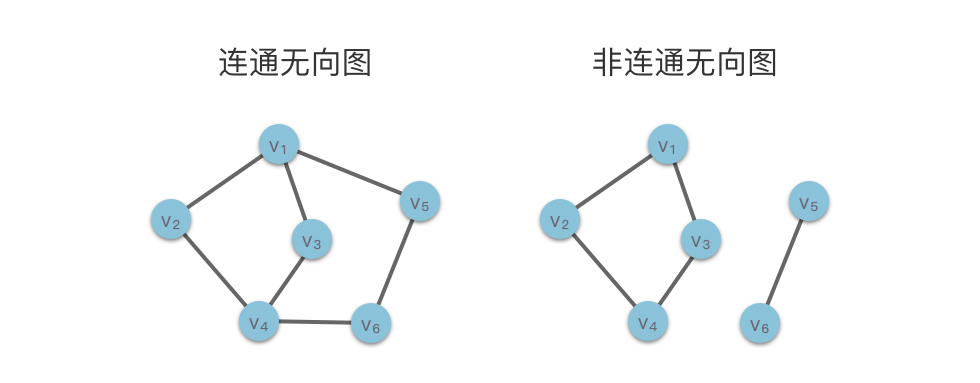
在无向图中,如果从顶点 viv**i 到顶点 vjv**j 有路径,则称顶点 viv**i 和 vjv**j 是连通的。
- 连通无向图:在无向图中,如果图中任意两个顶点之间都是连通的,则称该图为连通无向图。
- 非连通无向图:在无向图中,如果图中至少存在一对顶点之间不存在任何路径,则该图称为非连通无向图。
有些无向图可能不是连通无向图,但是其子图可能是连通的。这些子图称为原图的连通子图。而无向图的一个极大连通子图(不存在包含它的更大的连通子图)则称为该图的「连通分量」。
-
连通子图:如果无向图的子图是连通无向图,则该子图称为原图的连通子图。
-
连通分量:无向图中的一个极大连通子图(不存在包含它的更大的连通子图)称为该图的连通分量。
-
极⼤连通⼦图:无向图中的一个连通子图,并且不存在包含它的更大的连通子图。
-
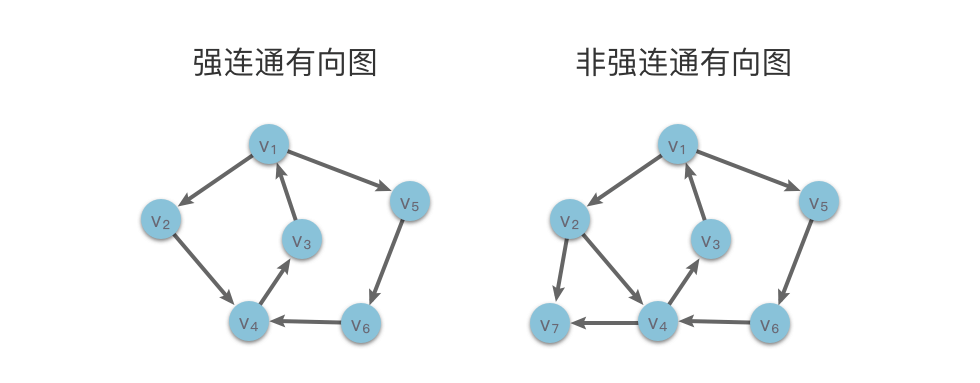
强连通有向图:如果图中任意两个顶点 viv**i 和 vjv**j,从 viv**i 到 vjv**j 和从 vjv**j 到 viv**i 都有路径,则称该图为强连通有向图。
-
非强连通有向图:如果图中至少存在一对顶点之间不存在任何路径,则该图称为非强连通有向图。
与无向图类似,有向图的一个极大强连通子图称为该图的 强连通分量。
- 强连通子图:如果有向图的子图是连通有向图,则该子图称为原图的强连通子图。
- 强连通分量:有向图中的一个极⼤强连通⼦图,称为该图的强连通分量。
- 极⼤强连通⼦图:有向图中的一个强连通子图,并且不存在包含它的更大的强连通子图。
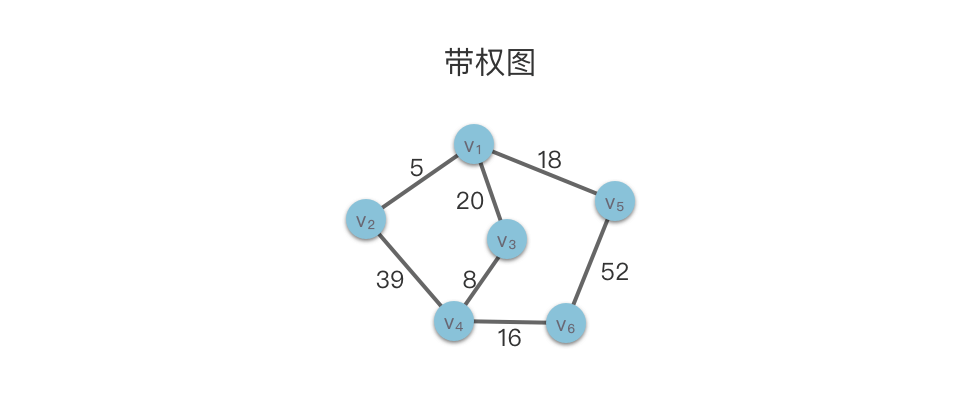
有时,图不仅需要表示顶点之间是否存在某种关系,还需要表示这一关系的具体细节。这时候我们需要在边上带一些数据信息,这些数据信息被称为 权。在具体应用中,权值可以具有某种具体意义,比如权值可以代表距离、时间以及价格等不同属性。
- 带权图:如果图的每条边都被赋以⼀个权值,这种图称为带权图。
- 网络:带权的连通⽆向图称为⽹络。
根据图中边的稀疏程度,我们可以将图分为「稠密图」和「稀疏图」。这是一个模糊的概念,目前为止还没有给出一个量化的定义。
- 稠密图(Dense Graph):有很多条边或弧(边的条数 ee 接近于完全图的边数)的图称为稠密图。
- 稀疏图(Sparse Graph):有很少条边或弧(边的条数 ee 远小于完全图的边数,如 e<n×log2ne<n×log2n)的图称为稀疏图。
存储结构
我们在实现图的存储时,重点需要关注边与顶点之间的关联关系,这是图的存储的关键。
图的存储可以通过「顺序存储结构」和「链式存储结构」来实现。其中顺序存储结构包括邻接矩阵和边集数组。链式存储结构包括邻接表、链式前向星、十字链表和邻接多重表。
邻接矩阵
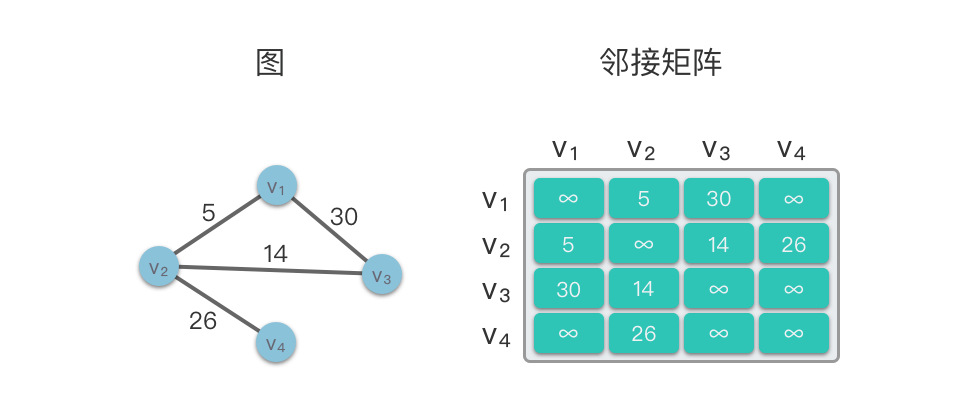
邻接矩阵(Adjacency Matrix):使用一个二维数组 adj‾matrixadjmatri**x 来存储顶点之间的邻接关系。
- 对于无权图来说,如果 adj‾matrix[i][j]adjmatri**x[i][j] 为 11,则说明顶点 viv**i 到 vjv**j 存在边,如果 adj‾matrix[i][j]adjmatri**x[i][j] 为 00,则说明顶点 viv**i 到 vjv**j 不存在边。
- 对于带权图来说,如果 adj‾matrix[i][j]adjmatri**x[i][j] 为 ww,并且 w≠∞w\=∞(即
w != float('inf')),则说明顶点 viv**i 到 vjv**j 的权值为 ww。如果 adj‾matrix[i][j]adjmatri**x[i][j] 为 ∞∞(即float('inf')),则说明顶点 viv**i 到 vjv**j 不存在边。
邻接矩阵的特点:
-
优点:实现简单,并且可以直接查询顶点 viv**i 与 vjv**j 之间是否有边存在,还可以直接查询边的权值。
-
缺点:初始化效率和遍历效率较低,空间开销大,空间利用率低,并且不能存储重复边,也不便于增删节点。如果当顶点数目过大(比如当 n>105n>105)时,使用邻接矩阵建立一个 n×nn×n 的二维数组不太现实。
-
时间复杂度:
- 初始化操作:O(n2)O(n2)。
- 查询、添加或删除边操作:O(1)O(1)。
- 获取某个点的所有边操作:O(n)O(n)。
- 图的遍历操作 :O(n2)O(n2)。
-
空间复杂度:O(n2)O(n2)。
代码实现
1 | import java.util.Arrays; |
我在写代码的时候,出现了一些小小的问题
主要是异常处理没完成的问题
1 | if (!isValid(vi) || !isValid(vj)) |
应该是这个逻辑,我写错了,大家注意
return
1 | null |
稍微修改了下,把检测权给输出出来了
边集数组
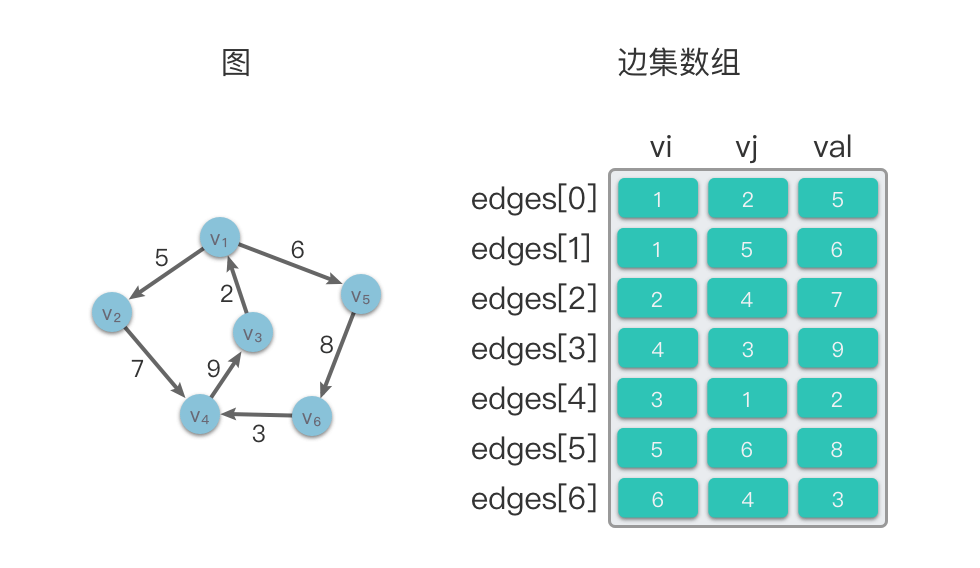
边集数组(Edgeset Array):使用一个数组来存储存储顶点之间的邻接关系。数组中每个元素都包含一条边的起点 viv**i、终点 vjv**j 和边的权值 valval(如果是带权图)。
边集数组的时间复杂度:
- 图的初始化和创建操作:O(m)O(m)。
- 查询是否存在某条边:O(m)O(m)。
- 遍历某个点的所有边:O(m)O(m)。
- 遍历整张图:O(nm)O(nm)。
边集数组的空间复杂度:
- 空间复杂度:O(m)O(m)。
代码实现:
1 | import java.util.ArrayList; |
return
1 | null |
一般来说,边集数组适合那些对边依次进行处理的运算,不适合对顶点的运算和对任何一条边的运算。
图的遍历
深度优先搜索
深度优先搜索算法(Depth First Search):英文缩写为 DFS,是一种用于搜索树或图结构的算法。深度优先搜索算法采用了回溯思想,从起始节点开始,沿着一条路径尽可能深入地访问节点,直到无法继续前进时为止,然后回溯到上一个未访问的节点,继续深入搜索,直到完成整个搜索过程。
代码实现
1 | public void depthFirstSearch(int start){ |
1 | Dfs4: |
但是一般使用递归的时候会出现不可控的错误
所以我们使用另一种方法
采用栈堆实现
代码实现
1 | public void DfsStack(int start){ |
广度优先搜索
广度优先搜索算法(Breadth First Search):英文缩写为 BFS,又译作宽度优先搜索 / 横向优先搜索,是一种用于搜索树或图结构的算法。广度优先搜索算法从起始节点开始,逐层扩展,先访问离起始节点最近的节点,后访问离起始节点稍远的节点。以此类推,直到完成整个搜索过程。
就是一层一层的访问呗
代码实现:
1 | public void bfs(int start){ |
可以借助队列来实现












